2025年01月09日
TataElxsi2025年01月09日
瑞萨2025年01月09日
Creaform2025年01月09日
CES20252025年01月09日
PTC
2025年01月08日
伏能士
2025年01月07日
Mendix 低代码平台
2025年01月06日
达索
2025年01月06日
海克斯康
2025年01月09日
宜科
2025年01月09日
梅卡曼德
2025年01月09日
堡盟
2025年01月08日
瓦尔特
2025年01月07日
新思科技
汽车保有量持续增多,城市停车位资源紧张,由于车辆和人均受自身条件影响而存在“视觉盲区”,泊车往往耗费大量的时间和精力,一直是新老司机的驾驶痛点。自动泊车系统相关技术的研究最早在国外展开。该系统最早在1992年的德国大众概念车上搭载,由于成本较高,体积过大,没有将该系统量产;2003年丰田普锐斯开始提供可选自动泊车功能;在国内,20世纪90年代初出现的倒车雷达以及倒车影像,自动泊车系统的发展大致经历了半自动泊车、全自动泊车、记忆泊车和自主代客泊车四个阶段。
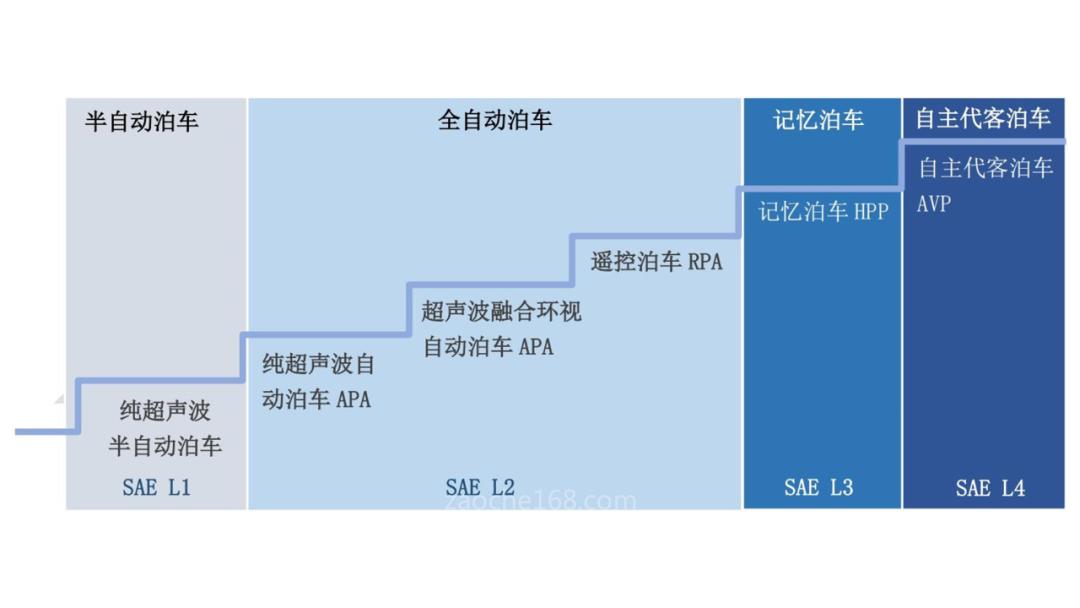
半自动泊车
半自动泊车基于车辆的超声波传感器实现车位感知,向驾驶员提供车位信息,并进行路径规划,系统自动控制车辆转向系统,驾驶员仅需按照仪表盘的提示对车辆纵向进行控制。

半自动泊车需要驾驶员实时监督,并控制档位、加速和减速,对应SAE L1级;对驾驶过程要求较高,且操作流程复杂,用户体验较差。
全自动泊车
全自动泊车更加智能化。全自动泊车系统可以对车辆进行横向和纵向的控制,同时需要驾驶员对车辆进行持续监控和有效接管,以保障泊车安全,属于SAE L2级别的泊车辅助系统。

按照传感器组成的不同,全自动泊车分为基于超声波雷达的全自动泊车、基于超声波与视觉融合的全自动泊车,其中传统超声波泊车方案仅能在由障碍物组成的车位实现泊车功能,应用场景有限,用户满意度不高。而基于超声波与视觉融合的全自动泊车系统有更强的探测物体的能力,可以对车辆周遭环境进行分类,能帮助泊车系统实现更丰富的感知。
记忆泊车
在全自动泊车基础上,记忆泊车可在相对更远距离和更复杂环境中自主完成泊入和泊出操作。记忆泊车建立在SLAM技术基础之上,利用车身传感器,学习、记录并储存用户常用的下车位置、停车地点及泊车行进路径,建立常用泊车路径的环境特征地图,车辆再次经过该地点时,系统将复现用户的泊车路径来代替驾驶员完成停车场内最后一段距离的低速驾驶和泊车。在外界环境发生较大变化,记忆泊车功能无法实现时,记忆泊车系统将要求驾驶员接管车辆或者返回原来位置,对应SAE分级的L3级别。

自主代客泊车
自主代客泊车是指用户在指定下客点下车,通过手机APP下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵与监控;用户通过手机APP下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点;若多辆车同时收到泊车指令,可实现多车动态的自动等待进入泊车位。车辆自动行驶过程中应能遵守道路交通规则,或停车场运营方所制定的场内交通规则。自主代客泊车显著的特点是车内无人。依靠更精准的感知、更强大的算力、更先进的自动驾驶算法,自主代客泊车系统可自动完成智慧停车场内的低速自动驾驶、自主避障、智能搜索车位和车辆泊入/泊出,目前业内公认的将最先实现商业化应用的L4级自动驾驶功能。





























































官方微信号

官方视频号
