2025年01月08日
本田2025年01月08日
西门子2025年01月08日
禾赛科技2025年01月08日
特斯拉2025年01月08日
海克斯康2025年01月08日
伏能士
2025年01月07日
Mendix 低代码平台
2025年01月06日
达索
2025年01月06日
海克斯康
2024年12月30日
云计算
2025年01月08日
瓦尔特
2025年01月07日
新思科技
2025年01月07日
欧姆龙
2025年01月06日
德国GMCI
2025年01月03日
海克斯康
问题分析
在高版本ROBOGUIDE软件的WeldPRO模块中创建完弧焊焊接机器人虚拟系统后,软件下方的Robot Alarms栏中会显示“ARC-045 Weld EQ is OFFLINE”警告信息,即焊接设备离线,点击“Fault Reset”按钮,就可将其消除。
但是还会弹出“ARC-213 AO: Invalid Arclink I/O EQ1”警告信息,也就是无效的Arclink I/O设备,再次点击“Fault Reset”按钮,警告完全消除。
每次在打开仿真项目文件时,警告信息仍然会出现,也可以通过点击“Fault Reset”按钮,进行消除。
虽然警告信息消除后,已经可以对弧焊焊接机器人进行示教编程与仿真运行,但是在虚拟仿真时,机器人在焊接过程中并不能像在低版本软件中那样产生焊接电弧弧光,也不能生成弧焊焊接焊缝模型。
为了彻底解决上述问题,通过查看《FANUC机器人报警代码列表操作说明书》得知,出现这两个警告信息的原因是机器人控制器未能与焊接电源成功建立通信,相关焊接通信I/O信号也未分配。
总的来说就是需要对机器人的弧焊焊接系统进行参数配置,本期就来介绍一下这部分内容。
Arc Tool介绍
Arc Tool(弧焊工具)是内嵌于FANUC机器人控制器中的专门用于弧焊焊接的应用程序软件包。Arc Tool除了基本的弧焊焊接功能外,还具备接触传感器、电弧传感器、多层多道焊接等扩展功能。本案例只介绍Arc Tool的基本功能。
使用Arc Tool应用程序时,必须设置应用程序所需的数据。在Arc Tool中,需要设置的应用程序数据大致包含以下四部分内容:
Arc Tool设置,也就是机器人弧焊焊接软件设置;
弧焊系统设置;
弧焊设备设置;
弧焊数据设置。
下面就详细介绍这四部分内容的设置方法。
机器人弧焊焊接软件设置
Arc Tool设置也叫弧焊焊接软件设置,是机器人能够作为弧焊焊接机器人的根基设置,它包括焊接电源设置、与弧焊焊接相关的速度单位的设置以及其他相关设置。该项内容需要在系统启动时设置,并且只能在机器人“控制启动”模式下完成。
在ROBOGUIDE软件中点击“Robot”菜单,在其下拉菜单中依次选择“Restart Controller”→“Controlled Start”,机器人进行控制启动,同时弹出简化模式的虚拟示教器,启动完成后示教器显示界面自动进入Arc Tool Setup界面。

在Arc Tool Setup界面中可以看到,默认生成的机器人弧焊焊接系统使用的焊接电源制造商为“林肯电气(Lincoln Electric)”,焊接标准为“美标(USA)”。
这里我们需要把焊接标准更改为“国标(China)”,并且把焊接电源制造厂商更改为“通用(General Purpose)”。使用示教器的操作面板设置相关项目值,详细设置内容如下表所示。

全部设置完成后,按“FCTN”键,选择“START (COLD)”,对机器人控制器进行冷启动,启动完成后设置内容生效。
机器人弧焊焊接系统设置
弧焊系统设置是对弧焊焊接机器人在焊接工序中与弧焊整体控制相关参数进行的设置,其中包含诸如电弧耗尽检测、原始焊道再继续、刮擦起弧等相关功能的设置。这些设置,在焊接系统设置界面内完成。
设置完成后,设置项目将被反映到所有的焊接设备与焊接数据中。
在ROBOGUIDE软件中,打开机器人虚拟示教器。然后在操作面板上按“MENU”键,依次选择“设置”→“焊接系统”,进入焊接系统设置界面。

按照实际需要对相关项目进行设置,对于虚拟仿真项目,可以按照下表进行设置。

机器人弧焊焊接设备设置
弧焊设备设置,是对与焊接电源控制相关的参数进行设置,即对弧焊焊接机器人系统连接的每台焊接电源的设置。机器人系统上连接有多台焊接电源时,可以针对每台焊接电源进行不同的设置。设置项目包括送丝机设置、焊接顺序设置等。这些设置,在焊接设备设置画面上完成。
设置完成后,这些内容将被反映到所选择的焊接电源及其焊接设备中所包含的所有焊接数据中。
在虚拟示教器的焊接系统设置界面中,按“F1 类型”键,在弹出的类型菜单中选择“焊接设备”,进入焊接设备设置界面。
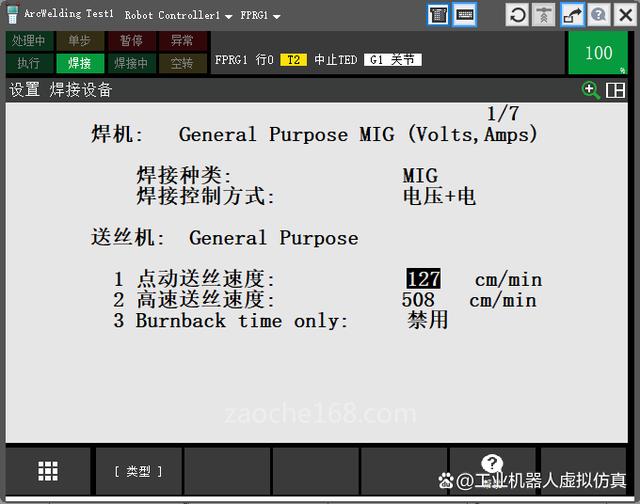
按照实际弧焊焊接工艺需要对相关项目进行设置,对于虚拟仿真项目,可以按照下表进行设置。

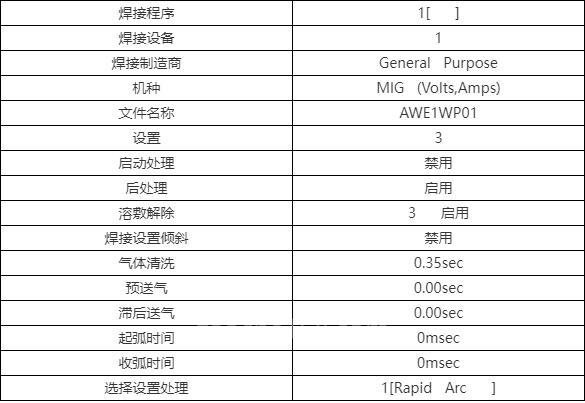
机器人弧焊焊接数据设置
弧焊数据设置是机器人在焊接时对焊接装置和周边设备发出的指令内容的设置。系统中每台焊接设备可以有多个焊接数据,并可以针对每个焊接数据进行不同的设置。设置项目中包含诸如焊接电流指令值、焊接电压指令值等焊接条件相关的设置和气体清洗时间、预送气时间等被连接的周边设备的设置以及针对每个焊接部位指定的特殊要求的设置等。
通过利用程序中的弧焊焊接指令来指定焊接数据编号和焊接条件编号,机器人执行到弧焊焊接指令处时将根据设置的焊接条件来执行焊接。
在弧焊数据中,针对每台焊接设备最多可定义20个焊接数据,在每个焊接数据内最多可定义32个焊接条件。
在虚拟示教器的操作面板上按“DATA”键,进入焊接程序数据界面。若是界面不是焊接程序数据界面,可以再按“F1 类型”,然后选择“焊接程序”即可进入。

在焊接程序数据界面中,将光标移动到焊接程序前的“+”上,然后按“F2 详细”,焊接程序展开,在其下可以设置焊接程序数据。

按照实际弧焊焊接工艺需求对焊接程序中的相关项目进行设置,对于虚拟仿真项目,可以按照下表进行设置。
焊接程序数据设置完成后,将光标移动到设置前的“+”上,再次按“F2 详细”,设置展开后可以在其中设置机器人弧焊焊接条件数据。

按照实际弧焊焊接工艺需求对焊接条件中的相关项目进行设置,对于虚拟仿真项目,可以按照下表进行设置。

焊接程序数据全部设置完成后,按“FCTN”键,在弹出的FUNCTION菜单中选择“重新启动”,对机器人控制器进行冷启动,重启后设置的弧焊焊接系统参数、弧焊焊接设备参数、弧焊焊接数据参数即刻生效。
机器人常用弧焊焊接指令介绍
FANUC机器人中的Arc Tool软件必须使用专用的弧焊焊接指令来触发执行,弧焊焊接指令通过Arc Tool软件能够向机器人指定何时、如何进行弧焊焊接。弧焊焊接指令主要包括弧焊开始指令、弧焊结束指令。机器人在执行弧焊开始指令和弧焊结束指令之间所示教的运动程序过程中,进行弧焊焊接。
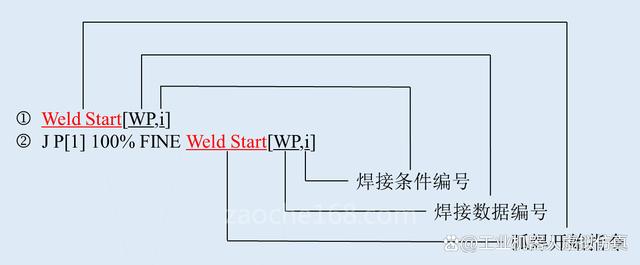
弧焊开始指令是使机器人开始执行弧焊焊接的指令,FANUC机器人的弧焊开始指令有两种表现形式,而每一种表现形式又包含两种使用方法。
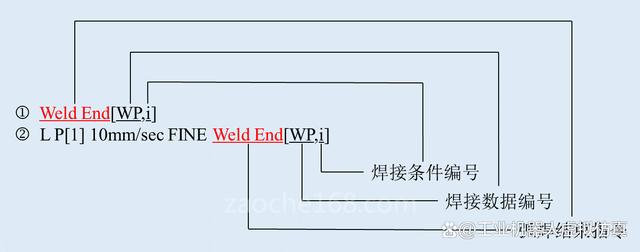
如下图所示,是机器人弧焊开始指令的第一种表现形式,即基于焊接条件编号的指令表现形式。其中,第一条是弧焊开始指令作为单独的程序语句的使用方法,而第二条是弧焊开始指令作为运动程序语句的附加功能选项的使用方法,二者在功能上是等效的。
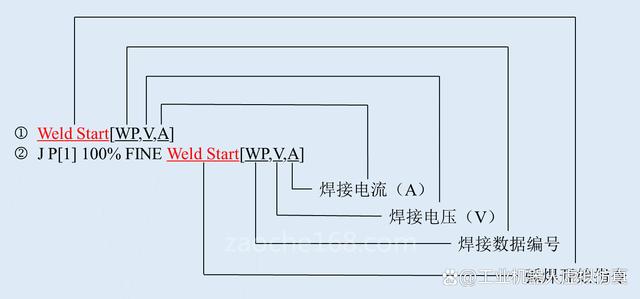
弧焊开始指令的第二种表现形式是基于焊接条件的表现形式,如下图所示,在这种表现形式中,可以在TP程序中直接指定焊接电压和焊接电流(或送丝速度)。这种表现形式也有两种使用方法,其用法与第一种表现形式一致。
弧焊开始指令中的焊接数据编号、焊接条件编号在焊接程序数据中的相互对应关系如下图所示。

弧焊结束指令是向机器人指定弧焊结束的指令,它也有两种表现形式,并且每一种表现形式也有两种使用方法。如下图所示,是其第一种表现形式,即基于焊接条件编号的指令表现形式,它的两种使用方法与弧焊开始指令相同。
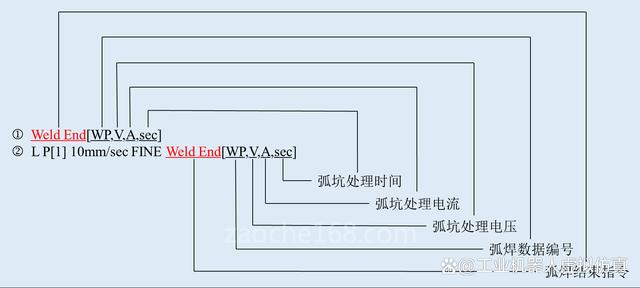
如下图所示,是弧焊结束指令的第二种表现形式,与弧焊开始指令不同,弧焊结束指令多了一项弧坑处理时间,其它的可设置项与弧焊开始指令相同,使用方法也一样。
弧焊结束指令中的焊接数据编号、焊接条件编号在焊接程序数据中的相互对应关系也与焊接开始指令一致。
机器人弧焊焊接速度设定
FANUC机器人的弧焊焊接速度可以直接在运动程序语句上指定,也可以通过焊接速度指令来设定。
焊接速度指令可以将机器人运动程序语句中的速度指定为焊接条件中设置的焊接速度,这样就可以将焊接电压、焊接电流、焊接速度作为焊接条件统一进行管理。每次示教时,就不必在程序上单独逐条设置焊接速度值了。焊接速度在程序语句中的应用格式如下图所示。
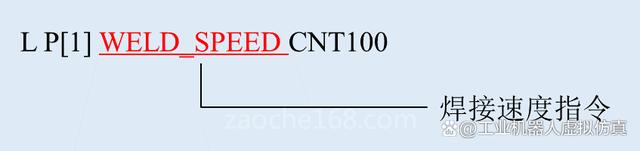
通过将机器人运动程序语句中的运行速度变更为“WELD_SPEED”(焊接速度),可以使机器人按照指定的焊接速度进行焊接,其执行的焊接速度是在本条运动程序语句之前的弧焊开始指令中焊接条件内指定的焊接速度。
要使用焊接速度指令,可以先将光标移动到机器人焊接运动程序语句的运行速度上,然后按“F3 焊接”,再按“ENTER”键,即可将速度值变更为焊接速度。
当遇到执行单步运行、未执行弧焊开始指令就执行带有焊接速度指令的运动语句、执行后退运动的情形时,机器人不会按照焊接速度运行,而是按照在弧焊焊接系统设置画面或弧焊焊接软件设置画面上设置的标准速度运行。
机器人仿真运行
全部设置完成后,就可以仿真运行了,仿真运行效果如下方动态图所示。机器人弧焊焊接程序的编写方法可参考之前发布过的“ROBOGUIDE软件机器人弧焊焊接虚拟仿真”系列文章。
可以看到,机器人对工件进行了焊接,并且焊接过程中产生了电弧弧光,同时生成了焊缝模型。

如果在仿真运行时不想让机器人产生电弧弧光和生成焊缝模型,可以在虚拟示教器的操作面板上按下“SHIFT”键后再按“WELD ENBL”键,来关闭机器人弧焊焊接。当然,重复此操作可以再次开启机器人弧焊焊接。
保存虚拟仿真项目后,再次打开时“ARC-045 Weld EQ is OFFLINE”警告信息也不再显示了。




























































官方微信号

官方视频号
