2024年06月03日
柯马2024年06月03日
HSR华数机器人2024年06月03日
艾利特机器人2024年06月03日
PTC2024年06月03日
欧姆龙2024年06月03日
德克威尔
2024年06月03日
穆尔电子
2024年06月03日
舍弗勒
2024年05月31日
大族机器人
2024年05月31日
多可机器人
2024年06月03日
直冷系统
2024年05月30日
德州仪器
2024年05月29日
固态电池
2024年05月27日
AVAS
2024年05月15日
ENNOVI
疫情挡不住自动驾驶人的步伐,2020汽车雷达和汽车视觉前瞻技术展示交流会在各位业界同仁的鼎力支持下,于6月18-19日如期在苏州高铁金科大酒店成功召开。
作为传感器细分领域的毫米波雷达和汽车视觉专业会议,现场吸引了行业300余行业人士,100多家企业参与,包括主机厂、系统集成商、毫米波雷达企业和芯片等元器件企业、高频PCB板、封装测试单位、吸波及塑化材料、摄像头系统集成商、解决方案供应商、模组厂商、元器件厂商(CMOS、DSP(ISP)、镜头、光学镜片等)相关科研机构和高等院校、行业媒体等代表亲临现场参与。

本次大会围绕行业趋势、市场预测、供应体系、系统应用、核心元器件、算法解决方案以及传感器融合等热点话题展开讨论,旨在为行业打造一个可以深度合作的专业综合性交流平台,聚集行业智慧,加速自动驾驶的落地。

怀着对汽车毫米波雷达和车载摄像头行业技术交流的渴求和行业人脉的需求,大会现场高朋满座,在热烈的氛围中由易贸信息科技(上海)有限公司副总史晓穆宣布大会开始,易贸信息科技(上海)有限公司CEO 叶登峰感谢致辞。苏州高铁新城大数据产业发展有限公司总经理陈国平致欢迎辞并介绍了智能驾驶产业的相城实践和机遇。
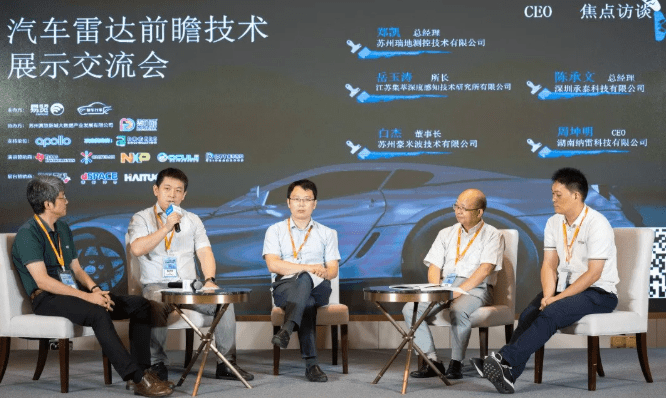
汽车雷达大会CEO焦点访谈
作为本次会议最具看点的环节,汽车雷达大会的CEO焦点访谈由苏州瑞地测控技术有限公司总经理郑凯主持, 江苏集萃深度感知技术研究所有限公司所长岳玉涛、湖南纳雷科技有限公司CEO周坤明、苏州豪米波技术有限公司董事长白杰、深圳承泰科技有限公司总经理陈承文共同参与进行。
讨论的主题围绕传感的融合是发展的必经之路,对于自动驾驶算法工程师和感知模组的研发工程师的挑战;在量产方面,那么对于初创型的公司,突围的机会在哪里?产业链中的自身附加值的定义;产业未来3年的发展趋势有怎样的预估;新基建中方面的市场怎么看?是否有相关布局等话题做了详细的探讨。

汽车视觉大会CEO焦点访谈
而汽车视觉大会的CEO焦点访谈由知行汽车科技(苏州)有限公司创始人&CEO宋阳主持, 魔视智能科技(上海)有限公司CEO虞正华、上海豫兴电子科技有限公司副总经理付兵凯、上海智驾汽车科技有限公司创始人兼董事长周圣砚、鹰驾科技(深圳)有限公司CTO段侪杰参与。
讨论的主题围绕计算机视觉目前在自动驾驶领域目前最大的瓶颈是什么;如何看待特斯拉自动驾驶的视觉为主+毫米波雷达方案和Waymo的激光为主+视觉+毫米波的方案优劣对比;新基建中汽车的自动驾驶和基础公路的建设也有着千丝万缕的联系是否有相关布局;后深度学习时代,自动驾驶领域会有哪些新的应用场景;中国本土adas供应商面临的最大瓶颈和挑战是什么等话题做了详细的探讨。

在6月18号大会第一天的主论坛中,首先由百度Apollo 技术委员会主席王亮进行精彩分享,这是百度于国内首次介绍了过去一年中百度Apollo Lite(参数|图片)在视觉环境感知系统上取得的最新技术进展分享,包括对数据驱动提升驾驶能力的实践和对L4自动驾驶传感器终局的认知和思考。

接下来由IHS Markit自动驾驶首席分析师王禹平对自动驾驶未来赛道以及传感器布局、消费趋势做了系统梳理,使得与会嘉宾对汽车雷达等传感器在自动驾驶应用及市场发展和产业链有了更清晰的认识。
主机厂对于传感器融合的自动驾驶量产之路的思考

广汽研究院基于深度学习和毫米波雷达融合的自动驾驶量产之路
商业落地是现阶段摆在自动驾驶产业面前最关键的问题,而作为自动驾驶汽车里面最核心的传感器件的成熟和商业落地就显得尤为紧迫。
从终端应用这块由来自广汽研究院智驾技术部郭继舜部长就传感器量产应用的方面给大家带来主机厂对自动驾驶从L2-L4阶段的发展思考,郭部长分别从L1/L2常见传感器配置及功能、后融合算法、深度学习的量产尝试、深度学习在量产中的边界到L2.5常见传感器配置及功能和自动驾驶应用做了系统梳理,并且列举了通用 Super Cruise和特斯拉 AutoPilot的传感器方案传感器方案。
同时介绍了L3常见传感器配置、功能安全以及L4自动驾驶中的视觉感知技术中前融合算法、基于前融合的边界提取、基于前融合的物体分类及对AI芯片的选择,同时其认为目前视觉为主的L4现阶段还不可行,如果增加5G的V2X可能是L4较好的解决方案。最后郭部长建议企业需要提供更好的算法和结构化的信息,在车规级雷达方向多做技术迭代,充满干货的演讲给现场听众带来很大启迪。

吉利商用车自动驾驶技术研发实践
无论国家层面还是企业自身都在积极推动汽车产业的清洁化、自动化、智能化。与乘用车相比,商用车自动驾驶落地具有更明确的目标和商业场景。商用车的自动驾驶将结合不同的落地场景打造可复制循环的商业模式闭环,降低开发成本,提升产品价值。
从需求侧看,因为有着更明确的目标和商业场景,商用车自动驾驶有望在港口、矿山、环卫清洁、公交及园区摆渡、干线物流等限定场景优先落地。
浙江吉利新能源商用车集团有限公司车联网开发主任工程师王春晶从吉利商用车自动驾驶技术研发实践的角度阐述了商用车自动驾驶发展趋势以及在城市内无人支线运输 、特定园区物流派送小车 、高速路段自动驾驶物流车 、高速路段自动驾驶客车 、特定园区自动驾驶小巴 、城际高速路无人巴士等领域的场景应用。
目前吉利重卡已经集成自动驾驶模块及相关传感器、车内显示屏,实现自动驾驶功能,同时在激光雷达、汽车雷达、摄像头等核心硬件进行相关的布局。充满干货的介绍,使得大家对商用车落地有了更深层次的理解和期待。

与传统的零部件公司完全不同,安波福在ADAS领域处于具有竞争优势的位置,安波福主要专注于主动安全、自动驾驶、提升驾乘体验和互联服务等领域的商业化进程,并提供为实现这些目标所需要的软件、先进的计算平台和网络架构等车辆的“大脑”和“神经系统”。
本次大会由安波福中国区总工程师郭恩庆带来了从ACC/AEB/TJA/ILC功能量产化角度来探讨传感器的融合的主题分享,分别从ADAS/AD函数演化路径、车载雷达发展、安波福前向&侧方雷达路线图、雷达、摄像机和激光雷达数据融合演进的角度阐述。
由于目前越来越复杂的功能和场景,比如(TJA/HWA/ILC(切入目标/压倒性目标、FCTA/RCTA/AEB-I(横向移动物体/转弯物体)、偏航车道定心(精确横向位置/航向/切入目标)等功能的逐步推进,郭总工介绍了第三代数据融合(统一)产品-360融合(4SRR+1 MRR+1摄像头)的必要性。使得与会嘉宾对自动驾驶应用、市场发展和产业链有了更清晰的认识。
接下来由国防科技大学博士施逸飞就面向场景智能感知的三维结构分析方法做了精彩的分析,施博士深入浅出的从视觉感知对数据采集到融合任务的角度切入,到三维结构分析延伸到深层神经网络的结构分析。由于遮挡会降低视觉感知能力,对称性检测可能有助于改进算法,这种分析方法在车道检测、无纹理物体的目标姿态估计、自主车辆路径规划等方面都有着宽泛的应用。

汽车雷达大会第二天继续延续第一天热烈演讲的气氛,首先由湖南大学电子与通信工程系副主任余小游根据车载毫米波雷达通信一体化主题做了系统阐述,余主任从军用、商用、民用在雷达通信一体化的三大应用领域 展开,依次介绍了汽车毫米波雷达类型、毫米波雷达通信一体化的技术基础 、毫米波信道,并从国内外研究现状角度剖析,介绍了求大同存小异、数据立方体、通信信道模型、距离速度估计等基本原理;以及天线阵结构、 波束形成网络 、 大规模MIMO 等关键技术,并对行业发展进行展望。干货满满的发言让与会嘉宾车载毫米波雷达通信一体化有了全面系统的认知。
车载毫米波雷达检测的挑战及应对

毫米波雷达测试对于各雷达厂商意义重大,由苏州瑞地测控技术有限公司总经理郑凯带来的针以毫米波雷达测试需求与测试方法为主题,从汽车行业的耐久性和测试测量的意义角度出发,介绍推进智能网联测试体系建设所需要承担的关键环节,实现从场景到传感器的融合测试然后到场景库构建流程,并列举了两种典型场景案例:人车冲突、匝道合流。
在场景与测试的交互式发展、毫米波雷达测试需求的演化方面也进行了详细的剖析,并详细介绍了苏州瑞地测控在理解工艺流程,明确测试目的,制定测试方法方面展开进行雷达模组研发和量产测试应对方法和主机厂商研发测试应对等方法的突出优势。
中外毫米波雷达PK,国产毫米波雷达量产化突围之路:技术创新成首要条件

国产汽车雷达企业崛起, 确保产品市场竞争力
随着自动驾驶汽车成为汽车产业重要发展趋势之一,诸多企业都试图在这场竞争中抢占一席,获取市场份额。国内汽车雷达企业也是摩拳擦掌,各显神通。在面对前装市场中主机厂的核心要求、车规量产难题、未来技术创新、融资等方面的障碍,雷达厂商创始人们也同样各有心得。
来自国内汽车雷达行业的明星企业,由前华为资深技术研发加上军工雷达设计成员组建的研发团队深圳承泰科技凭借一系列汽车雷达产品在行业里脱颖而出。承泰科技目前已达到或接近国外一线厂家的产品水平,总经理陈承文就第五代雷达在指标规格、功能特性、应用性能上的变化与提升、第五代雷达的关键设计、关键器件/组件、关键工艺开发过程做了全面系统梳理以及汽车毫米波雷达未来几年应用与发展做了展望,让大家对国产毫米波雷达的快速发展为之侧目。
傲酷雷达4D高清成像雷达及应用场景探索
美国傲酷公司亚太区总裁&CMO郄建军就4D高清成像雷达及应用场景探索方面进行演讲,其介绍到点云成像毫米波优点:全天候、全天时、长距离、复杂动态场景成像、易车规、低成本,其虚拟孔径成像雷达可大大提升角分辨率,可将实体接收天线孔径乘以5-100倍。
4D点云成像毫米波雷达的技术突破打破了传统毫米波雷达分辨率低的缺点,又因为其性价比,未来可以替代激光雷达,满足主机厂的需要。并演示了傲酷4D高清技术的发展动态及其在多应用场景的探索。
国内外毫米波雷达高性能芯片设计突破-助力雷达成像与数据融合
点击进入看图评论
TI在毫米波雷达领域的布局可谓“厚积厚发”,来自TI德州仪器雷达与处理器产品系统与应用总监蒋宏就TI高性能芯片助力雷达成像与数据融合方面做了系统的演讲。
蒋总介绍了三款基于76–81GHz毫米波雷达芯片,随后展示了角雷达-单芯片方案、成像雷达-TI级联方案、双模级联:MIMO和TX波束形成、Imaging radar方案。TI产品从集成度、搭建深度学习框架、感测精度以及布局方面都超越其他同类方案,赢得现场阵阵掌声。

作为提供毫米波雷达解决方案的主流厂商,恩智浦在车载感知领域拥有丰富的行业经验和产品阵容。因为高等级自动驾驶非常依赖 AI技术,需要运行大量深度学习算法。因此高等级自动驾驶芯片内部有多个AI加速器,但目前这些AI加速器还存在性能低、功耗高、体积大的问题。
来自恩智浦半导体,大中华(参数|图片)区毫米波雷达产品经理杨昌就雷达信号加速器在高性能雷达中的应用的话题展开系统综述,其分别从毫米波雷达发展趋势与市场需求、雷达应用和路线图、雷达信号加速器高性能功耗比的实现机制、压缩和加速的原理以及提供的技术支持,参考设计助力开发者快速出样等话题展开深入探讨,其面向汽车雷达现在及未来的应用和创新给在座嘉宾带来了新的思考和方向。

国内的雷达芯片厂商同样进展迅速,去年,加特兰推出了77/79GHz Alps SoC系列芯片,将帮助用户更好更快地开发出更有竞争力的雷达传感器产品。Alps SoC系列芯片根据汽车自动驾驶的不同场景需求,可覆盖前向雷达、前视角雷达、后视角雷达、侧方和后方雷达等,为用户提供从长距、中距到短距、超短距的全场景完整解决方案。
加特兰微电子科技(上海)有限公司业务拓展主管赵英松在大会上以“AiP芯片在车载毫米波雷达传感器上的应用”为主题做了分享。其针对“车载毫米波雷达传感器的发展趋势”、“小型化雷达的车载应用”、“封装集成天线AiP技术”三个主题分享了新一代Alps AiP芯片在车载毫米波雷达传感器上的应用。
会上赵英松谈到AiP是一款集成封装天线的芯片。在天线布局上,AiP芯片集成了4组发射天线,4组接收天线。因为本身具备高集成度,外围只需很少的器件—— 一颗电源芯片、一颗Flash和CAN收发器,就可以完成雷达模组的搭建,从而降低了客户的开发难度和成本。体积小、安装简单,可以满足更多的场景需求。精彩的发言让大家对于国内的雷达芯片厂商未来发展充满期待。
高频PCB板材应对汽车雷达的高性能及高性价比要求

随着中国主动安全技术的发展,越来越来多公司展开了毫米波雷达的设计工作,工程师们需要面对24GHz和77~79GHz的高频挑战。PCB板材作为射频电路的信号载体及辐射源,其中有很多因素可能显著影响到设计,选择一款合适的板材并且了解这些因素无疑是成功的关键,ROGERS(罗杰斯)是材料技术领域的世界领先者,产品覆盖对技术要求最苛刻的电路应用领域,旗下PCB材料可轻松应对汽车雷达的高性能及高性价比要求。
罗杰斯高级技术市场工程师袁署光就“77GHz汽车雷达天线设计的PCB材料和加工考虑”为主题进行演讲,从PCB材料基本概述、77GHz雷达天线设计的几个关键PCB材料特性、PCB制造对设计师的影响,设计师对影响雷达性能认识角度系统阐述了PCB板材合理选材和加工的重要性。

在电子产品和设备中,电路板是一个不可缺少的部件,它起着电路系统的电气和机械等的连接作用。如何将电路中的元器件按照一定的要求,在PCB上排列组合起来,是PCB设计师的主要任务之一。实践证明一个良好的电路设计,必须有合理的元器件布局,才能使电路系统在实体组合后达到稳定、可靠的工作。
作为射频百花潭,创始人,射频专家徐兴福老师就射频毫米波PCB设计要点相关话题做了详细介绍,根据毫米波电路板设计互连难点、板材及厚度的选择,PCB表面处理的选择与影响、过孔的影响、PCB表面处理的选择与影响、连接器互连技巧等问题进行展开剖析,并讲解了国产射频微波高频高速材料的产业和技术发展现状及国产射频高速面临新的机遇和挑战。
车载毫米波雷达抗干扰与识别技术

接下来演讲嘉宾由珠海上富电技股份有限公司成都分公司总经理毫米波雷达负责人刘洋给大家带来题目为毫米波雷达相互干扰的问题及思考的精彩演讲,珠海上富电技股份有限公司主营超声波感应系统、影像监测系统、微波雷达探测系统, 提供ADAS(先进驾驶辅助系统)解决方案, 为实现无人驾驶提供技术支撑。
刘总针对毫米波雷达干扰问题做了详细的分享,在列举毫米波雷达干扰案例分享中,通过大量分析发现由于当车辆装上挂车后,左右雷达之间能够形成多次发射的传输路径,从而导致了左右雷达的相互干扰,并从如何有效解决这些干扰问题提出了思考。
信息超材料在新型雷达探测及通信一体化中的应用

信息超材料是传统超材料的数字化和信息化发展,集物理调控和信息调控于一体,突破了现有信息系统仅在数字域和信号域进行信息处理的模式,为实现基于物理空间和数字空间统一的新型信息系统及其在通信、雷达、电子对抗等领域的颠覆性发展和应用奠定基础。
最后一篇汽车雷达大会的精彩发言由江苏赛博空间科学技术有限公司,东南大学毫米波国家重点实验室,技术总监邱兆坤针对信息超材料在新型雷达探测及通信一体化中的应用展开,其从车载毫米波雷达传感器的发展趋势、小型化雷达的车载应用、封装集成天线(AiP)技术角度给与会嘉宾带来启迪。
同期举办的汽车视觉前瞻技术展示交流会同样精彩纷呈。ADAS发展叠加高壁垒,车载镜头成为行业新蓝海, 一套完整的ADAS系统一般需包括6个摄像头,而高端智能汽车的摄像头个数可达到8个。Yole 预计全球摄像头模组产业链市场空间有望在 2024 年达到450 亿美元,其中汽车摄像头市场超过 50 亿美元。
中外汽车视觉方案企业PK,视觉感知赋能智慧出行产业落地

博世在环境感知方面搭载了各种技术,包括超声波传感器、雷达传感器和摄像头等。其中,摄像头在结构和功能性方面最接近于人眼,因此成为了自动驾驶技术的重要元素并在辅助驾驶功能上发挥至关重要的作用。
博世智能驾驶系统总监徐浩以AI摄像头赋能驾驶员辅助和自动驾驶系统为主题介绍了博世智能视觉系统、博世第三代前视摄像头和博世第二代近距离摄像头,介绍了博世近距离感知系统,目前已经在宝马七系配置的3D环视系统可以提供市场标杆的人机交互设计、最佳的畸变校正和仿真画面 。
在ADAS 领域,Mobileye 是毫无疑问的领头羊, 这两年间,Mobileye拉拢了若干主机厂加入REM的联盟,真正开始REM的量产之路。未来,Mobileye 将联合合作伙伴为当地公司提供基于高精地图的位置服务。预计到 2030 年,光地图数据就价值 35 亿美元——这是绝对的变现利器。鉴于 Mobileye 在中国和印度市场已经稳住脚步,未来这些区域的高精地图值得大家期待。
本次大会由Mobileye中国地区汽车业务经理Elie Luskin以Mobileye—The Mapping Revolution为主题给与会嘉宾带来行业启迪,首先Elie Luskin介绍了Mobileye HD Mapping REM,由于Mobileye的配置侧重于低成本、以摄像头为中心的方法,更可以融合激光雷达和雷达数据,以构建360度的道路景观环境模型的集成模式使Mobileye为ADAS和AV提供了一个经济有效的解决方案。
自动驾驶方面面临着众多挑战,比如从最初车道保持功能到最终无人出租车的ODD持续升级所需要的算力增加,以及算力增加后如何去平衡能耗和系统的成本,还包括为了安全行驶如何去实现十几亿公里全场景的路测。这些都是在技术上必须面对的问题。
基于此,英伟达自动驾驶业务总监朱力以人工智能助力自动驾驶中的视觉解决方案为主题给行业同仁带来思考。朱力谈到英伟达基于人工智能的自动驾驶计算模型,从L2-L5相同架构的硬件和软件方案,端到端的数据采集、模型训练、仿真和实测的系统方案。
视觉方案贯穿自动驾驶始终,从数据采集车的搭建,周围环境的采集,视觉传感器充当着及其重要的角色,英伟达在加速计算上根植了25年,是全球视觉计算技术的行业领袖和GPU图形处理器的发明者。同时英伟达基于自己强大的芯片、计算平台和服务器集群,借助成熟的CUDA架构和丰富的生态,运用人工智能和深度学习技术,在自动驾驶领域助力视觉解决方案的大规模运用和性能提升。

国内汽车视觉解决方案厂商的演讲同样精彩,目前由于干线物流自动驾驶面临着其特有的挑战,需要通过充分挖掘传感数据特性、并针对重卡运营中对感知距离、感知精度等需求进行针对性开发,这对传感配置、同步标定、数据融合等都提出了新的要求。
同时,在完全无人化自动驾驶系统尚不能大规模部署的当下,如何将低级别自动驾驶中的运营数据和高级别无人驾驶的研发数据闭环打通,并尽可能缩小两套系统在数据特性、数据使用方式上的差异,也是自动驾驶公司需要突破的技术难点。
来自苏州智加科技有限公司的高级主任科学家崔迪潇以多目视觉主导的L4级自动驾驶闭环感知系统为主题进行演讲,围绕上述两点,分享智加科技的思考与进展。

而新一代的视觉人工智能技术,可以准确感知车辆周围的环境目标,实现厘米级的高精定位。通过视觉和多传感器融合,采用低成本的传感器,可以实现高精度、高可靠性的自动泊车和代客泊车系统,解决现有自动泊车系统场景适应性差的难题,实现大规模量产。
魔视智能科技(上海)有限公司CEO虞正华以基于视觉人工智能的自动泊车和代客泊车为主题介绍了乘用车最早能够量产落地的L4自动驾驶场景-自主代客泊车(AVP)– “最后一公里”的自动驾驶、自主代客泊车(AVP)的生态、AVP系统操作流程图、对于定位算法需求、系统软件架构等话题并延伸到魔视智能科技RPA 功能、APA 功能以及作为自动驾驶创业公司的护城河:领先的算法以及算法、芯片和数据三位一体、全栈式自动驾驶产品等几大法宝。
自动驾驶中感知系统利用传感器对环境中的人、车、物等进行检测、识别,为车辆决策提供数据支持。知行汽车科技(苏州)有限公司创始人&CEO 宋阳以无人驾驶中的计算机视觉应用为主题,探讨计算机视觉在无人驾驶中的应用、无人驾驶中的道路目标检测、可行驶区域的识别,无人驾驶中的多目标跟踪,单目视觉的距离估计等方面的技术。

2016 年前后,国内以 ADAS 为主的智能驾驶市场刚刚开始升温。从后装市场到前装布局,从乘用车国产化到商用车法规市场,国内涌现了一批策略各异的视觉方案供应商企业。要做好一款单目视觉前装产品,有两个指标非常关键。
第一个是检测精度。第二个是一致性。智驾科技抓住了这样的市场窗口。智驾科技此前一直相对低调,如今却以覆盖前装商用客车市场 80% 以上的市场份额走向台前。先后打入客车、重卡前装市场,拿下可观的量产订单后,他们已经开始切入对乘用车市场的布局。
上海智驾汽车科技有限公司创始人兼董事长周圣砚以感知赋能:前装ADAS落地还需绕过哪些“坑”?为主题,从全球智慧驾驶技术和产业化现状以及行业面临共性问题着手详细阐述了智驾科技以视觉感知赋能智慧出行产业落地、感知赋能:构建卓越的单目立体视觉到以感知赋能智慧出行全产业链详细阐述了智驾科技在汽车视觉的产业布局。
随着新能源、智能网联、共享出行的快速发展,汽车行业迎来了真正的技术革命,影像光学基础技术及汽车智能化的发展让电子后视镜取代传统光学后视镜成为可能。 电子后视镜不仅能解决传统光学后视镜视野范围局限及因光线明暗、雨雪天气等影响传统视镜可视效果导致的交通事故,还可以通过降低风阻风噪实现节能2%-3%,更可以实现智能网联、事故取证等增值功能。
上海豫兴电子科技有限公司副总经理付兵凯以CMS的眼睛为主题带来了CMS行业的精彩介绍,付总首先介绍了CMS巨大的市场空间,面对国内电子后视镜商用车和乘用车前装市场接近千亿元规模, 豫兴科技进行行业布局,以MEKRA LANG、ORLACA为标杆,以防水、抗震、排气减压长寿命摄像机为核心,结合影像光学、图像处理、视频矩阵等核心技术,致力成为国内CMS行业的引领者,为推动行业发展贡献更多力量。
传统的双目视觉方案在实际应用时有几大难点,一方面双目设备需要保证在产品生命周期中两个摄像头的相对位置要始终保持不变,能适应不同的温差、气候。这需要对摄像头固定模组的设计和工艺提出严苛的要求,也大大推高了设备维修和重新校准的成本。另一方面由于两个摄像头之间需要拉开一定的距离,整个设备就会变得很大,对于寸土寸金的车内空间而言成本高昂。
基于目前的现状,北京双髻鲨科技有限公司CTO伍宽在2020汽车视觉大会现场带来了主题为“新一代的双目视觉技术”的精彩演讲,去年年底,双髻鲨带来好消息,区别于传统双目相机不能检测障碍物类型,设备维修和重新校准的成本,占用车内空间大的难题,双髻鲨宣布在双目技术上取得重大进展,其独特的”自由双目“技术可以使用两个完全独立的摄像头实现双目系统,以摆脱双目设备体积大、工艺复杂、安装困难、成本高等固有缺陷。
双髻鲨立志做“盲区终结者”,突破传统商用车盲区障碍的困扰,“自由双目”技术展现了特别性能,采用220度的鱼眼镜头,双目的有效检测角度超过150度,雷达的检测能力覆盖了整个车身右侧,检测精度可以达到厘米级,能适应各种复杂光线情况,独特的自校准技术让设备终生无需额外的维护,在双目应用比较广泛的安防、工业检测、交通等领域,“自由双目”技术有很大的施展空间。

接下里进行演讲的鹰驾科技(深圳)有限公司成立于2015年8月,专注于商用车和特种车智能安全辅助系统及方案供应商,国家高新技术企业。 CTO段侪杰带来话题:基于环视的盲区可视化及相关技术的精彩介绍,段总从用医疗影像的手段保障行车的安全角度进行阐述,对比了智能医疗 vs 智能驾驶异曲同工之处,感知和数据优化重建、多模态信息融合技术、盲区问题和环视方案和视觉特点和盲区可视化方案。

汽车视觉大会最后一篇精彩发言由来自北京未动科技有限公司副总经理廖云志带来,主题为智能驾舱视觉技术的发展趋势及场景落地。首先廖总对智能座舱系统阶段进行阐述,智能座舱拥抱汽车行业发展新兴技术趋势,从消费者应用场景角度出发而构建的HMI体系。
第一阶段电子座舱、第二阶段智能助理、第三阶段人机共驾、第四阶段第三空间 ,而当前正处于第二阶段向第三阶段过度时期,即生物识别技术应用,催生驾驶员监控系统迭代,增强车辆感知能力的第二阶段到车辆可在上车-行驶-下车用车周期中,为驾乘人提供场景化的服务,实现机器自主/半自主决策的第三阶段。
伴随着政策法规催生驾驶员监控DMS迅速发展,DMS成为自动驾驶全阶段发展的必然要求 ,主机厂对DMS的采用迎来爆发期 ,DMS乘用车新车安装迎来高增长 ,法律法规对汽车安全要求+消费者对智能化的强烈需求+行业趋势的推动下,智能座舱视觉AI已成为汽车产业的发展浪潮。
未动科技专注于汽车智能驾舱人机交互系统研究,依托人脸识别、姿态识别和手势识别视觉交互人工智能技术,为智能驾舱提供视觉交互技术和解决方案。公司的长期战略专注驾舱内人与机器的多模态交互,实现预测和理解用户的交互意图,将汽车从智能行驶升级到拥有智能情感交互的终端,为车主带来更安全、舒适、便捷的用车体验。

本次2020汽车雷达和汽车视觉前瞻技术展示交流会在大家的鼎力支持及参与下圆满结束了!各位嘉宾关于汽车雷达和汽车视觉产品与技术、多传感器融合专题探讨让我们看到国内外汽车雷达、视觉、芯片等企业的不懈努力的精神。
“谋定而后动”,相较于激光雷达,毫米波雷达+摄像头的融合方案在成本上的优势得到释放。 伴随着高精度大带宽的毫米波雷达方案出现,未来它们之间在高精度探测上的距离将逐渐缩小。高效的算法和新的级联技术将使毫米波雷达和激光雷达在可见的未来产生某种竞争关系,甚至通过毫米波+摄像头的融合方案,完全取代激光雷达在Level 3级以上自动驾驶应用存在可能。
此时在汽车雷达和汽车视觉这条赛道上,需要携手产业上下游合作伙伴共同努力,对于初创企业,专注深耕细分市场加大技术投入,增强自身的实力和技术,才能“倚剑而立”。
汽车雷达和汽车视觉前瞻技术展示交流会将成为行业友商的年度聚会交流平台,智车行家也将一如既往地提供自动驾驶行业干货,欢迎关注智车行家公众号:智能驾驶资讯时刻分享。



























































官方微信号

官方视频号
