2025年01月08日
本田2025年01月08日
西门子2025年01月08日
禾赛科技2025年01月08日
特斯拉2025年01月08日
海克斯康2025年01月08日
伏能士
2025年01月07日
Mendix 低代码平台
2025年01月06日
达索
2025年01月06日
海克斯康
2024年12月30日
云计算
2025年01月08日
瓦尔特
2025年01月07日
新思科技
2025年01月07日
欧姆龙
2025年01月06日
德国GMCI
2025年01月03日
海克斯康
日立制作所2008年10月21日宣布,开发可根据汽车方向舵角来控制制动力的方法,并验证了其效果(图1)。如将开发的控制方法应用于汽车,则任何人均可像熟练驾驶员一样驾驶。由于可以进行最合适的减速,半径20m的转弯时,可确保安全的入弯速度可从50km/h提高到70km/h。日立准备将该技术用于以电动机构实现转向和制动等的X-By-Wire。“希望5年后实现实用化”(日立制作所)。

图1:日立制作所发布制动和转向联动的控制系统
此次的联动控制方法,以着眼于加速度的时间变化——加加速度为特点。通过日立与神奈川工科大学的共同研究,发现加加速度与人的平稳驾驶感觉相关。以该成果为基础,确定了控制制动力所需的车辆加速度目标值的计算方法(图2)。

图2:加速度目标值的计算方法
另外,日立制作所还着眼于舵角和加加速度的密切联系。以此为基础,进一步改进计算公式,不是使用加加速度信息,而是使用方向舵角就可得到同等效果的简单公式。测定加加速度需要使用日立制作所以前试制的加加速度传感器及具有微分计算加速度传感器功率功能等的追加装置,会使测定变得复杂。另一方面,将舵角信号应用于车辆控制的方法由于比较普遍,因此易于实现。
此次的控制方法除X-By-Wire技术外,还可用于许多汽车上配备的防侧滑装置用制动控制系统(图3)。
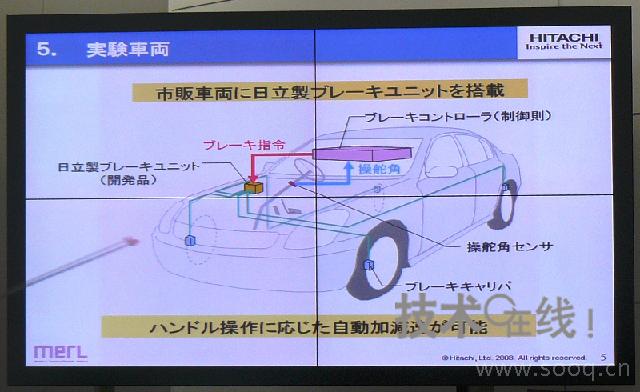
图3:系统构成
日立制作所预定在“汽车技术会 2008年秋季大会”(名古屋国际会场,08年10月22~24日)上,公布该成果。
来源:【日经BP社报道】




























































官方微信号

官方视频号
