

海康机器人3D激光轮廓传感器基于激光三角测量原理,通过硬件内置的高精度3D算法,实时输出高帧率、微米级精度的点云数据、深度图和亮度图数据,广泛适用于3C、锂电、汽配、光伏等行业中3D测量及检测场景。
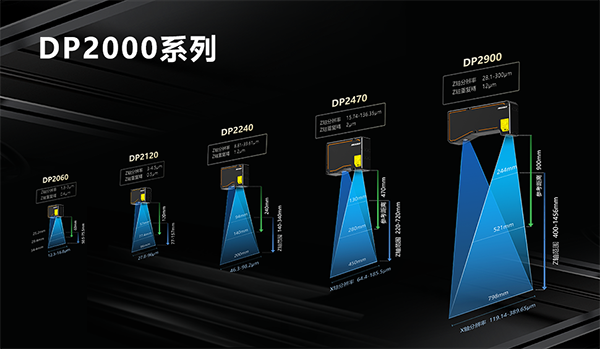
海康机器人3D激光轮廓传感器目前已发布DP2000和DP3000两大系列。其中DP2000推出五款型号,单轮廓点数为2048点,最高采集频率达到10KHz,X轴测量范围25.2-720mm,Z轴重复精度0.4-24um,线性度±0.01% of MR,且DP2240和DP2470支持红蓝光两个版本选配。
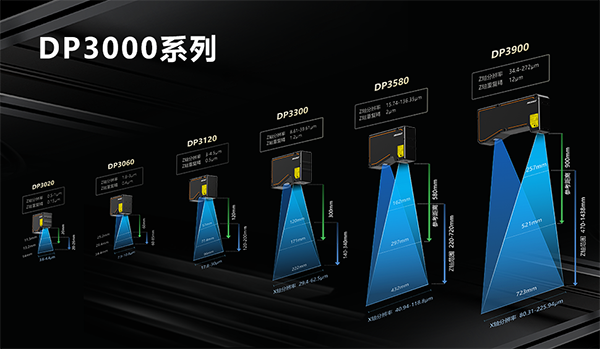
DP3000系列推出六款型号,轮廓点数升级为3200点,最高检测频率提升到19KHz,在超高精度测量方向,进一步扩充了DP3020型号,覆盖11.5-14mm的X轴宽度,实现0.15um的Z轴重复精度,同时DP3300和DP3580两个版本同样支持红蓝光两个版本选配。
强大的算法处理能力
● 多模式后处理
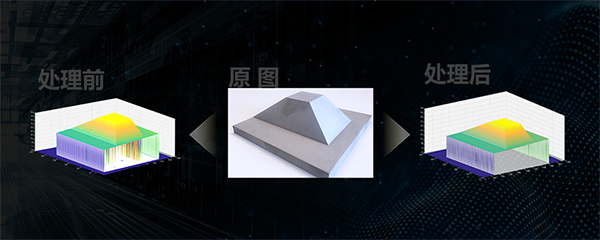
在相机中内置了丰富的后处理算法,包括空间滤波、时域滤波、空点填充、双向插值、边缘延拓等,方便客户选用,并且不占用主机的CPU资源。
一键调试,快速部署
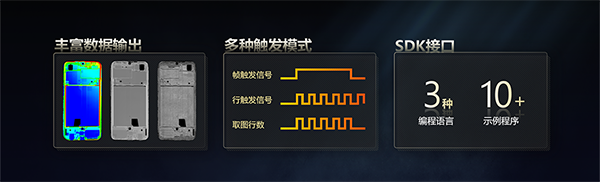
相机对外提供丰富的数据接口,包括轮廓数据、点云数据、深度图、亮度图。同时兼容多种触发模式,支持差分编码器触发输入,支持行触发、帧触发,行+帧触发的应用模式。通过SDK集成激光轮廓传感器到第三方软件框架,提供C、C#、Python三种语言版本的SDK,包括主流视觉分析软件在内的10多种集成使用示例,便于用户的二次开发。
● 深度图一键调试
● IO信号监测
在配套的客户端软件中,简化深度图的调参过程,支持一键调试,并且提供IO信号监测工具,便于项目现场快速调试和部署。
VM 3D算法平台
VM 3D算法平台是专门为3D高精度定位、测量、缺陷检测设计开发的平台级软件,基于图形化交互、流程式编辑和可视化配置的框架特性,为用户提供功能丰富、操作便捷的软件方案开发平台。

软件继承了原有的2D视觉算法模块,集成机器视觉多种算法组件,实现2D和3D视觉检测方案的整合。
丰富行业应用
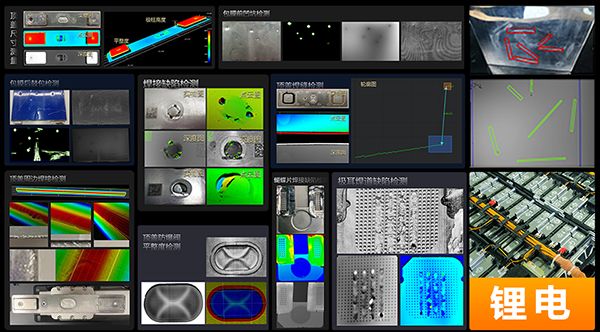
海康机器人3D解决方案完整覆盖锂电中段工艺,其中包括极片入壳前极耳焊接缺陷检测、入壳后顶盖焊缝尺寸测量、顶盖周边焊接缺陷检测、顶盖平整度检测、注液封口后密封钉缺陷检测、六面检等。
汽车零配件尺寸检测应用不断追求精度和稳定性,对于插针检测的针脚排序问题以及密封圈检测的形变问题,海康机器人在VM 3D中开发专用算子,降低了方案搭建的难度,提升了检测的效率和效果。

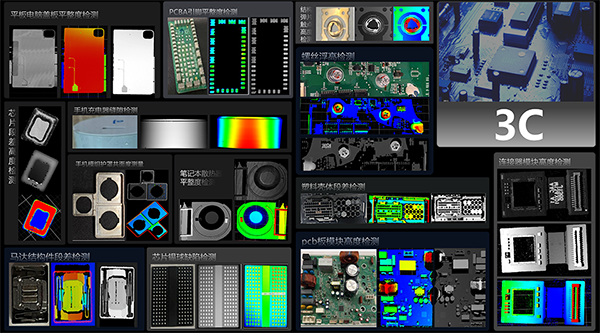
3C行业中,海康机器人3D解决方案主要应用集中在消费类电子产品的平整度、共面度、缝隙宽度和段差尺寸测量。
(来源:海康机器人)




































































 京公网安备 11011202001138号
京公网安备 11011202001138号